CANSAT
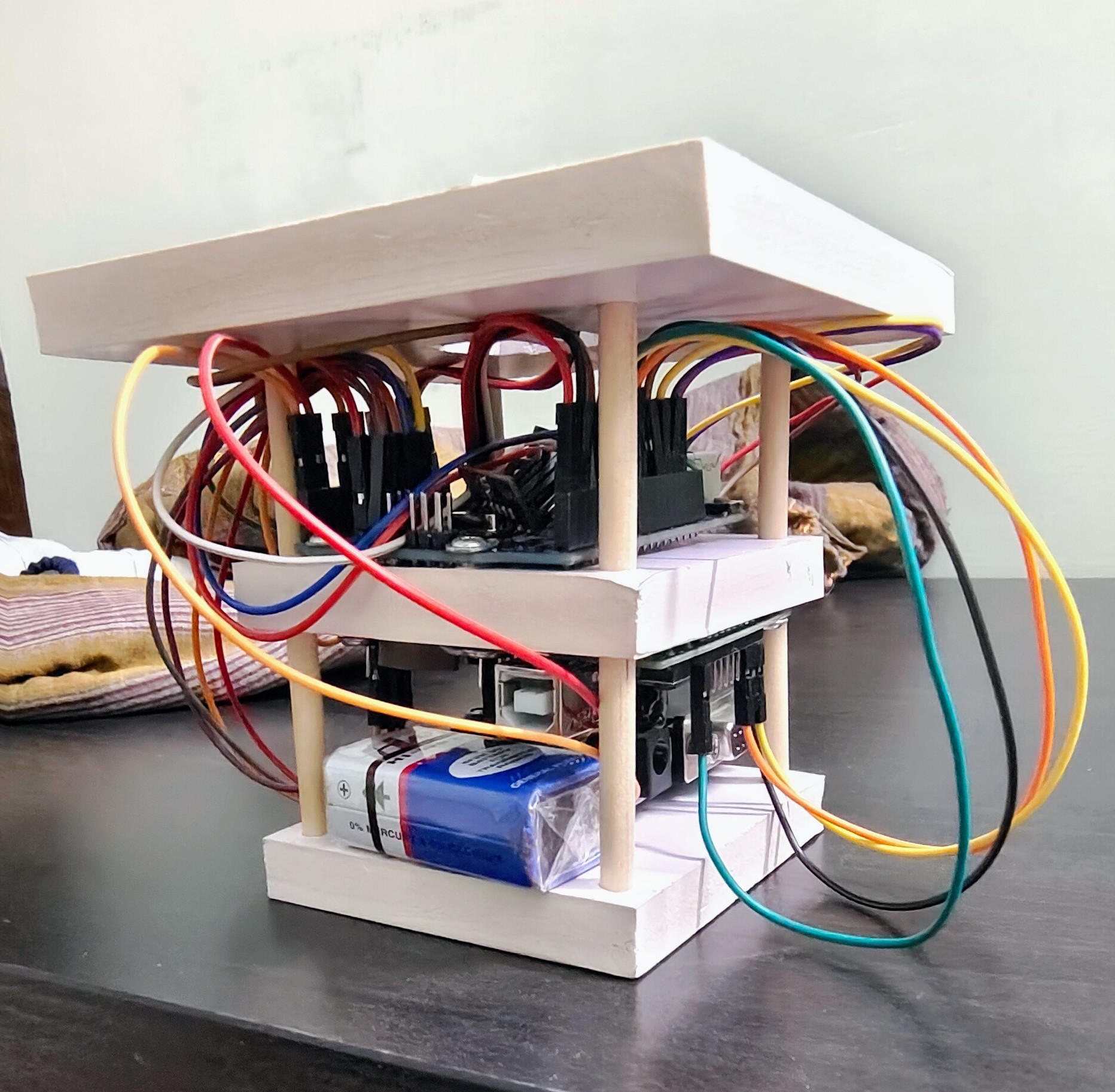
A CANSAT is a simulation of a real satellite, integrated within the volume and shape of a soft drink can. The challenge for the students is to fit all the major subsystems found in a satellite, such as power, sensors, and a communication system, into this minimal volume. The CANSAT is then launched to an altitude of a few hundred metres by a rocket or dropped from a platform or captive balloon and its mission begins: to carry out a scientific experiment and achieve a safe landing.
CANSATs offer a unique opportunity for students to have a first practical experience of a real space project. They are responsible for all aspects: designing the CANSAT, selecting its mission, integrating the components, testing, preparing for launch and then analysing the data.
Components
Things used in this project
| Hardware components |
|
|
| 3D Printed Mounts |
|
x 1 |
| 9V Batteriesr |
|
x 2 |
| Arduino UNO |
|
x 1 |
| BMP 280/180 |
|
x 1 |
|
Circuit Boards / Bread Boards |
|
x 1 |
| DS1307 RTC |
|
x 1 |
|
GPS Reciever Module |
|
x 1 |
| Jumper Wires |
|
|
| Adequate LEDS |
|
x 1 |
| MPU 6050 |
|
x 1 |
| Peizoelectric Buzzer |
|
x 1 |
| SG 90 Servo Moter |
|
x 1 |
| SPST SLIDE Switch |
|
x 1 |
| SSD 1306 OLED |
|
x 1 |
| Voltage Sensor |
|
x 1 |
| XBEE S2C
|
|
x 1 |
CODE
#include < SoftwareSerial.h >
#include < Adafruit_BMP085.h >
#include "I2Cdev.h"
#include "MPU6050.h"
#include < Wire.h >
#include "RTClib.h"
Adafruit_BMP085 bmp;
static const int RXPin = 4, TXPin = 3;
static const uint32_t GPSBaud = 9600;
SoftwareSerial ss(RXPin, TXPin);//transmit
SoftwareSerial mySerial(10, 11); // RX, TX
SoftwareSerial tr(12, 13); // RX, TX,xbee
TinyGPSPlus gps;
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
MPU6050 accelgyro;
int16_t ax, ay, az;
int16_t gx, gy, gz;
#define OUTPUT_READABLE_ACCELGYRO
#define LED_PIN 13
bool blinkState = false;
RTC_DS1307 rtc;
char daysOfTheWeek[7][12] = {"Sunday", "Monday", "Tuesday", "Wednesday", "Thursday", "Friday", "Saturday"};
int offset =20;// set the correction offset value
#include < Servo.h >
Servo myservo;
int pos = 0;
String fline = "",sline = "",tline = "";
int x =0;
void setup() {
// put your setup code here, to run once:
myservo.attach(9);
Serial.begin(9600);
if (!bmp.begin()) {
Serial.println("Could not find a valid BMP085 sensor, check wiring!");
while (1) {}
}
ss.begin(GPSBaud);
Serial.println(F("FullExample.ino"));
Serial.println(F("An extensive example of many interesting TinyGPS++ features"));
Serial.print(F("Testing TinyGPS++ library v. ")); Serial.println(TinyGPSPlus::libraryVersion());
Serial.println(F("by Mikal Hart"));
Serial.println();
Serial.println(F("Sats HDOP Latitude Longitude Fix Date Time Date Alt Course Speed Card Distance Course Card Chars Sentences Checksum"));
Serial.println(F(" (deg) (deg) Age Age (m) --- from GPS ---- ---- to London ---- RX RX Fail"));
Serial.println(F("----------------------------------------------------------------------------------------------------------------------------------------"));
Serial.println("Initializing I2C devices...");
accelgyro.initialize();
Serial.println("Testing device connections...");
Serial.println(accelgyro.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed");
pinMode(LED_PIN, OUTPUT);
while (!Serial); // for Leonardo/Micro/Zero
if (! rtc.begin()) {
Serial.println("Couldn't find RTC");
while (1);
}
if (! rtc.isrunning()) {
Serial.println("RTC is NOT running!");
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
}
while (!Serial) {;
// wait for serial port to connect. Needed for native USB port only
}
Serial.println("BIOREACTER SYSTEM");
// set the data rate for the SoftwareSerial port
tr.begin(9600);
tr.println("Hello, world?");
}
void loop() {
Serial.print("Temperature = ");
Serial.print(bmp.readTemperature());
Serial.println(" *C");
Serial.print("Pressure = ");
Serial.print(bmp.readPressure());
Serial.println(" Pa");
// Calculate altitude assuming 'standard' barometric
// pressure of 1013.25 millibar = 101325 Pascal
Serial.print("Altitude = ");
Serial.print(bmp.readAltitude());
Serial.println(" meters");
Serial.print("Pressure at sealevel (calculated) = ");
Serial.print(bmp.readSealevelPressure());
Serial.println(" Pa");
// you can get a more precise measurement of altitude
// if you know the current sea level pressure which will
// vary with weather and such. If it is 1015 millibars
// that is equal to 101500 Pascals.
Serial.print("Real altitude = ");
Serial.print(bmp.readAltitude(101500));
Serial.println(" meters");
Serial.println();
delay(500);
static const double LONDON_LAT = 51.508131, LONDON_LON = -0.128002;
printInt(gps.satellites.value(), gps.satellites.isValid(), 5);
printFloat(gps.hdop.hdop(), gps.hdop.isValid(), 6, 1);
printFloat(gps.location.lat(), gps.location.isValid(), 11, 6);
printFloat(gps.location.lng(), gps.location.isValid(), 12, 6);
printInt(gps.location.age(), gps.location.isValid(), 5);
printDateTime(gps.date, gps.time);
printFloat(gps.altitude.meters(), gps.altitude.isValid(), 7, 2);
printFloat(gps.course.deg(), gps.course.isValid(), 7, 2);
printFloat(gps.speed.kmph(), gps.speed.isValid(), 6, 2);
printStr(gps.course.isValid() ? TinyGPSPlus::cardinal(gps.course.deg()) : "*** ", 6);
unsigned long distanceKmToLondon =
(unsigned long)TinyGPSPlus::distanceBetween(
gps.location.lat(),
gps.location.lng(),
LONDON_LAT,
LONDON_LON) / 1000;
printInt(distanceKmToLondon, gps.location.isValid(), 9);
double courseToLondon =
TinyGPSPlus::courseTo(
gps.location.lat(),
gps.location.lng(),
LONDON_LAT,
LONDON_LON);
printFloat(courseToLondon, gps.location.isValid(), 7, 2);
const char *cardinalToLondon = TinyGPSPlus::cardinal(courseToLondon);
printStr(gps.location.isValid() ? cardinalToLondon : "*** ", 6);
printInt(gps.charsProcessed(), true, 6);
printInt(gps.sentencesWithFix(), true, 10);
printInt(gps.failedChecksum(), true, 9);
Serial.println();
smartDelay(1000);
if (millis() > 5000 && gps.charsProcessed() < 10)
Serial.println(F("No GPS data received: check wiring"));
}
// This custom version of delay() ensures that the gps object
// is being "fed".
static void smartDelay(unsigned long ms)
{
unsigned long start = millis();
do
{
while (ss.available())
gps.encode(ss.read());
} while (millis() - start < ms);
}
static void printFloat(float val, bool valid, int len, int prec)
{
if (!valid)
{
while (len-- > 1)
Serial.print('*');
Serial.print(' ');
}
else
{
Serial.print(val, prec);
int vi = abs((int)val);
int flen = prec + (val < 0.0 ? 2 : 1); // . and -
flen += vi >= 1000 ? 4 : vi >= 100 ? 3 : vi >= 10 ? 2 : 1;
for (int i=flen; i< len; ++i)
Serial.print(' ');
}
smartDelay(0);
}
static void printInt(unsigned long val, bool valid, int len)
{
char sz[32] = "*****************";
if (valid)
sprintf(sz, " %ld ", val);
sz[len] = 0;
for (int i=strlen(sz); i < len; ++i)
sz[i] = ' ';
if (len > 0)
sz[len-1] = ' ';
Serial.print(sz);
smartDelay(0);
}
static void printDateTime(TinyGPSDate &d, TinyGPSTime &t)
{
if (!d.isValid())
{
Serial.print(F("********** "));
}
else
{
char sz[32];
sprintf(sz, "%02d/%02d/%02d ", d.month(), d.day(), d.year());
Serial.print(sz);
}
if (!t.isValid())
{
Serial.print(F("******** "));
}
else
{
char sz[32];
sprintf(sz, "%02d:%02d:%02d ", t.hour(), t.minute(), t.second());
Serial.print(sz);
}
printInt(d.age(), d.isValid(), 5);
smartDelay(0);
}
static void printStr(const char *str, int len)
{
int slen = strlen(str);
for (int i=0; i< len; ++i)
Serial.print(i< slen ? str[i] : ' ');
smartDelay(0);
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
#ifdef OUTPUT_READABLE_ACCELGYRO
Serial.print("a/g:\t");
Serial.print(ax); Serial.print("\t");
Serial.print(ay); Serial.print("\t");
Serial.print(az); Serial.print("\t");
Serial.print(gx); Serial.print("\t");
Serial.print(gy); Serial.print("\t");
Serial.println(gz);
#endif
#ifdef OUTPUT_BINARY_ACCELGYRO
Serial.write((uint8_t)(ax >> 8)); Serial.write((uint8_t)(ax & 0xFF));
Serial.write((uint8_t)(ay >> 8)); Serial.write((uint8_t)(ay & 0xFF));
Serial.write((uint8_t)(az >> 8)); Serial.write((uint8_t)(az & 0xFF));
Serial.write((uint8_t)(gx >> 8)); Serial.write((uint8_t)(gx & 0xFF));
Serial.write((uint8_t)(gy >> 8)); Serial.write((uint8_t)(gy & 0xFF));
Serial.write((uint8_t)(gz >> 8)); Serial.write((uint8_t)(gz & 0xFF));
#endif
blinkState = !blinkState;
digitalWrite(LED_PIN, blinkState);
DateTime now = rtc.now();
Serial.print(now.year(), DEC);
Serial.print('/');
Serial.print(now.month(), DEC);
Serial.print('/');
Serial.print(now.day(), DEC);
Serial.print(" (");
Serial.print(daysOfTheWeek[now.dayOfTheWeek()]);
Serial.print(") ");
Serial.print(now.hour(), DEC);
Serial.print(':');
Serial.print(now.minute(), DEC);
Serial.print(':');
Serial.print(now.second(), DEC);
Serial.println();
Serial.print(" since midnight 1/1/1970 = ");
Serial.print(now.unixtime());
Serial.print("s = ");
Serial.print(now.unixtime() / 86400L);
Serial.println("d");
// calculate a date which is 7 days and 30 seconds into the future
DateTime future (now + TimeSpan(7, 12, 30, 6));
Serial.print(" now + 7d + 30s: ");
Serial.print(future.year(), DEC);
Serial.print('/');
Serial.print(future.month(), DEC);
Serial.print('/');
Serial.print(future.day(), DEC);
Serial.print(' ');
Serial.print(future.hour(), DEC);
Serial.print(':');
Serial.print(future.minute(), DEC);
Serial.print(':');
Serial.print(future.second(), DEC);
Serial.println();
Serial.println();
delay(3000);
int volt = analogRead(A0);// read the input
double voltage = map(volt,0,1023, 0, 2500) + offset;// map 0-1023 to 0-2500 and add correction offset
voltage /=100;// divide by 100 to get the decimal values
Serial.print("Voltage: ");
Serial.print(voltage);//print the voltge
Serial.println("V");
delay(500);
for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
unsigned long int gpsl =12345, gpslt =34567;
int v=12,temp=20,hmd=23,p = 90, al= 200,ph=6,x=14,y=5,z=8,hr=15,m=30;
//thisString =thisString+String(gpsl, DEC)+";"+ String(gpslt, DEC) +";"+String(temp, DEC)+";"+String(ph, DEC)+";"+String(x, DEC);
// thisString =thisString+gpsl+";"+ gpslt+";"+temp+";"+ph+";"+x;
fline="";
fline =fline+ "1"+gpsl+" "+gpslt;
sline="";
sline = sline+"2"+v+"volt_"+temp+"°_"+hmd+"%_"+p+"Pa_"+al+"m";
tline="";
tline = tline+"3"+"X: "+x+" Y: "+y+" Z: "+z+" time:"+hr+":"+m;
Serial.println(fline);
tr.println(fline);delay(2000);
tr.println(fline);delay(2000);
Serial.println(sline);
tr.println(sline);delay(2000);
Serial.println(tline);
tr.println(tline);delay(2000);
}